Système de contrôle robotique
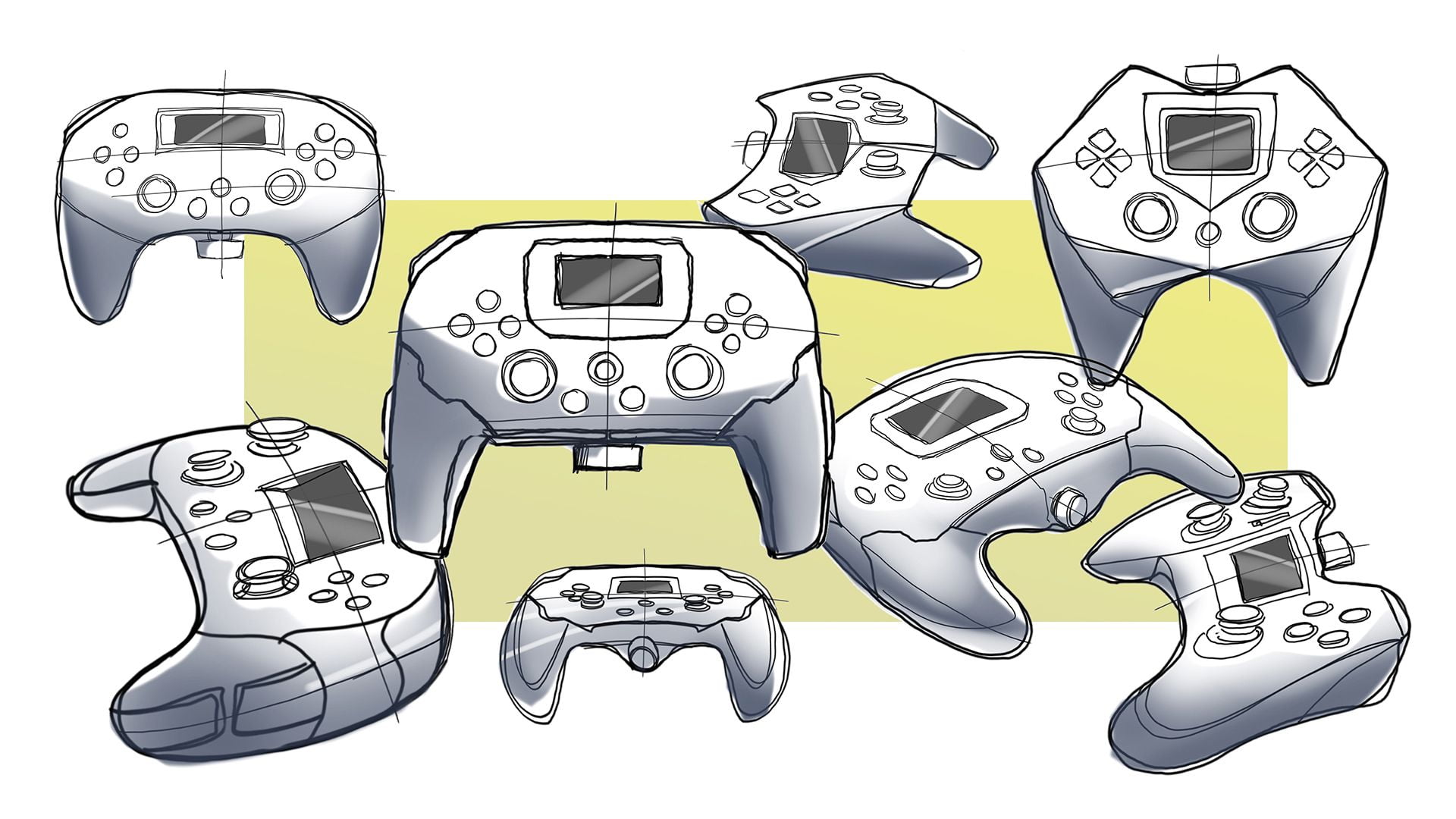
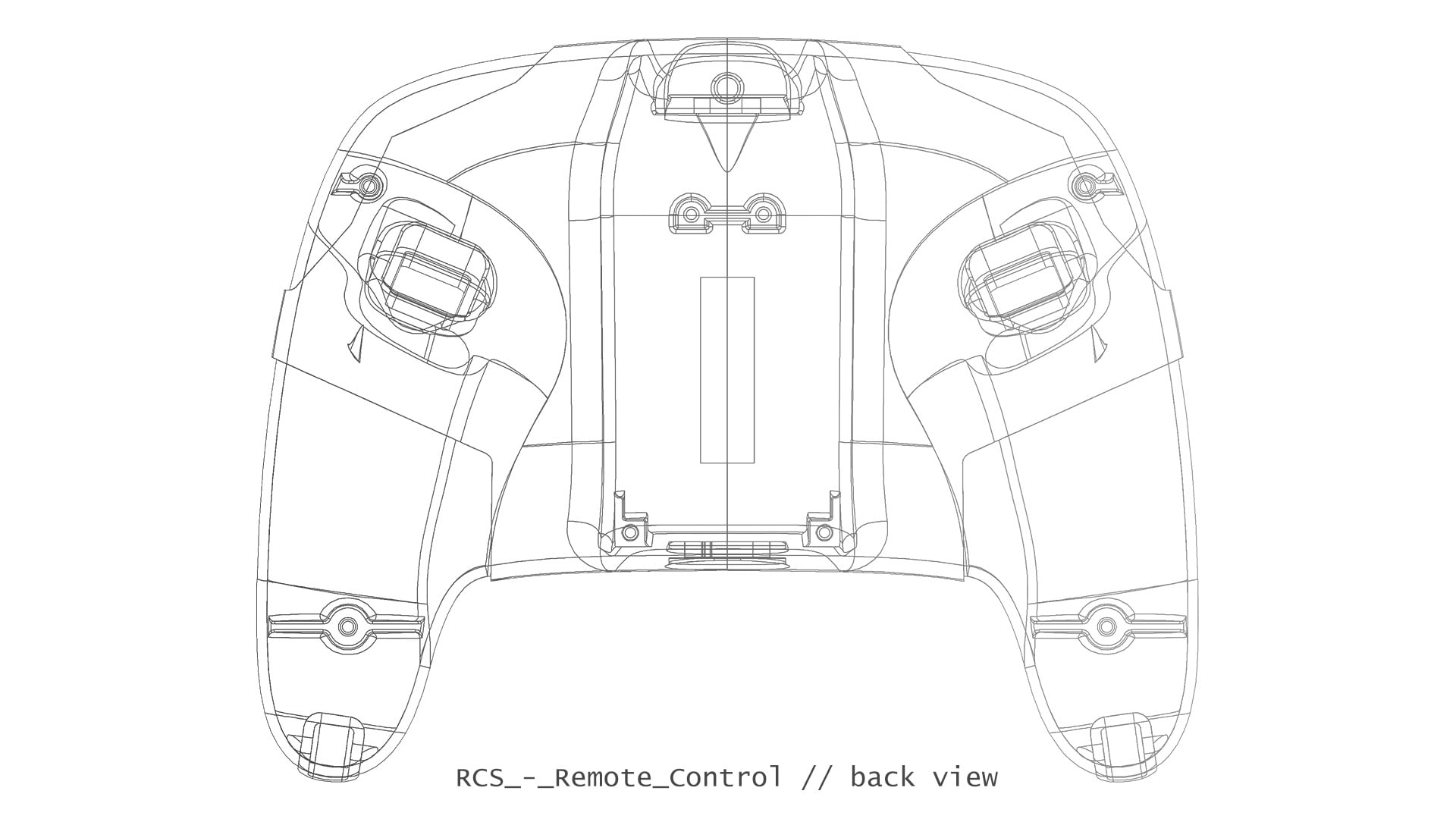
SurfaceID a participé au développement du concept et à la conception mécanique du contrôleur central d’une plate-forme d’intégration complètement ouverte pour les systèmes robotiques. L’appareil deviendrait l’interface utilisateur connectée aux instrumentations, aux ensembles de capteurs, aux logiciels d’autonomie et aux principaux systèmes d’entraînement des équipements.
La télécommande devait être robuste et hermétique pour pouvoir être utilisée même sous la pluie, le sable et la boue, tout en conservant l’ergonomie optimale d’une télécommande portable.