Robotic Control System
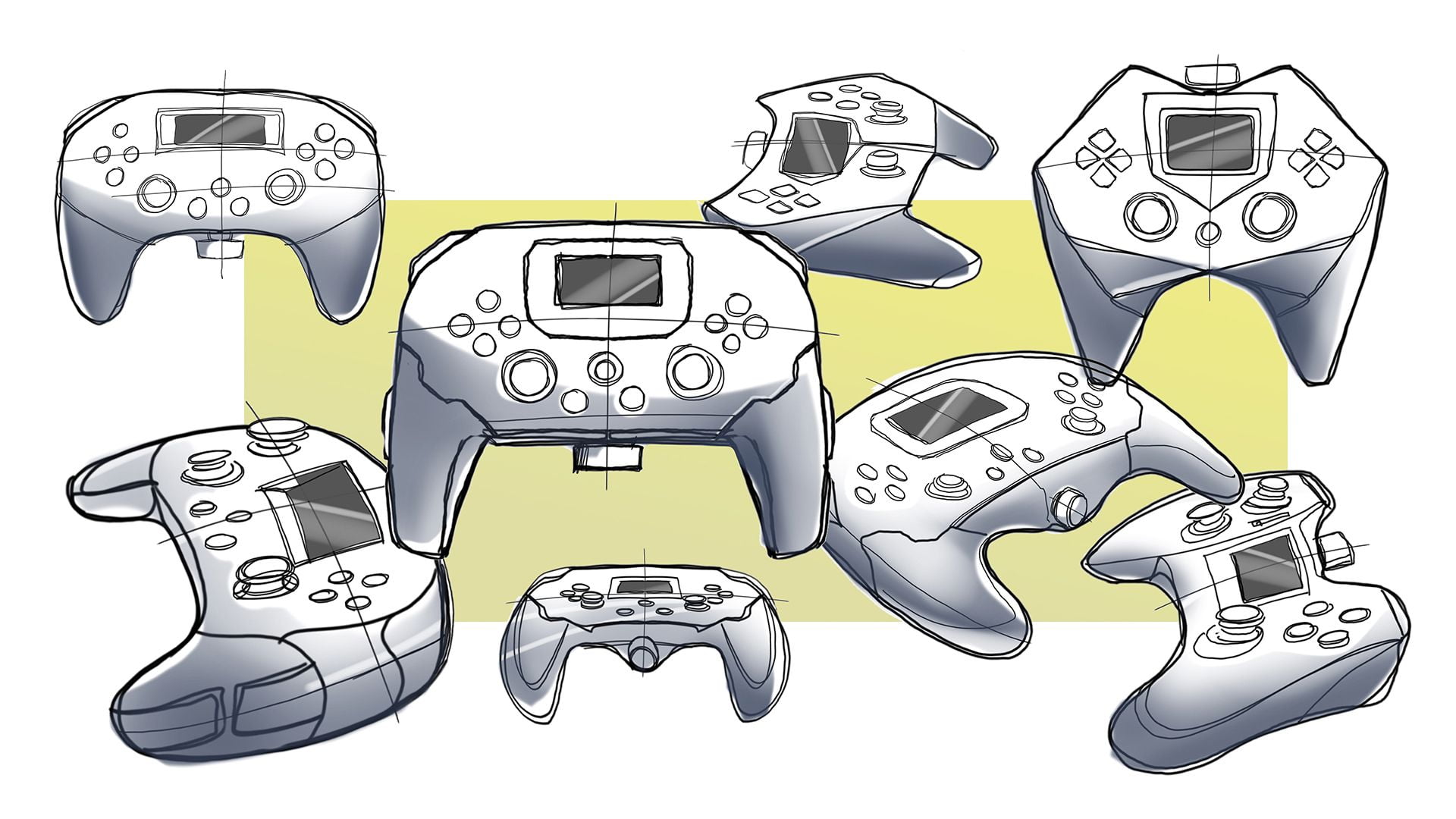
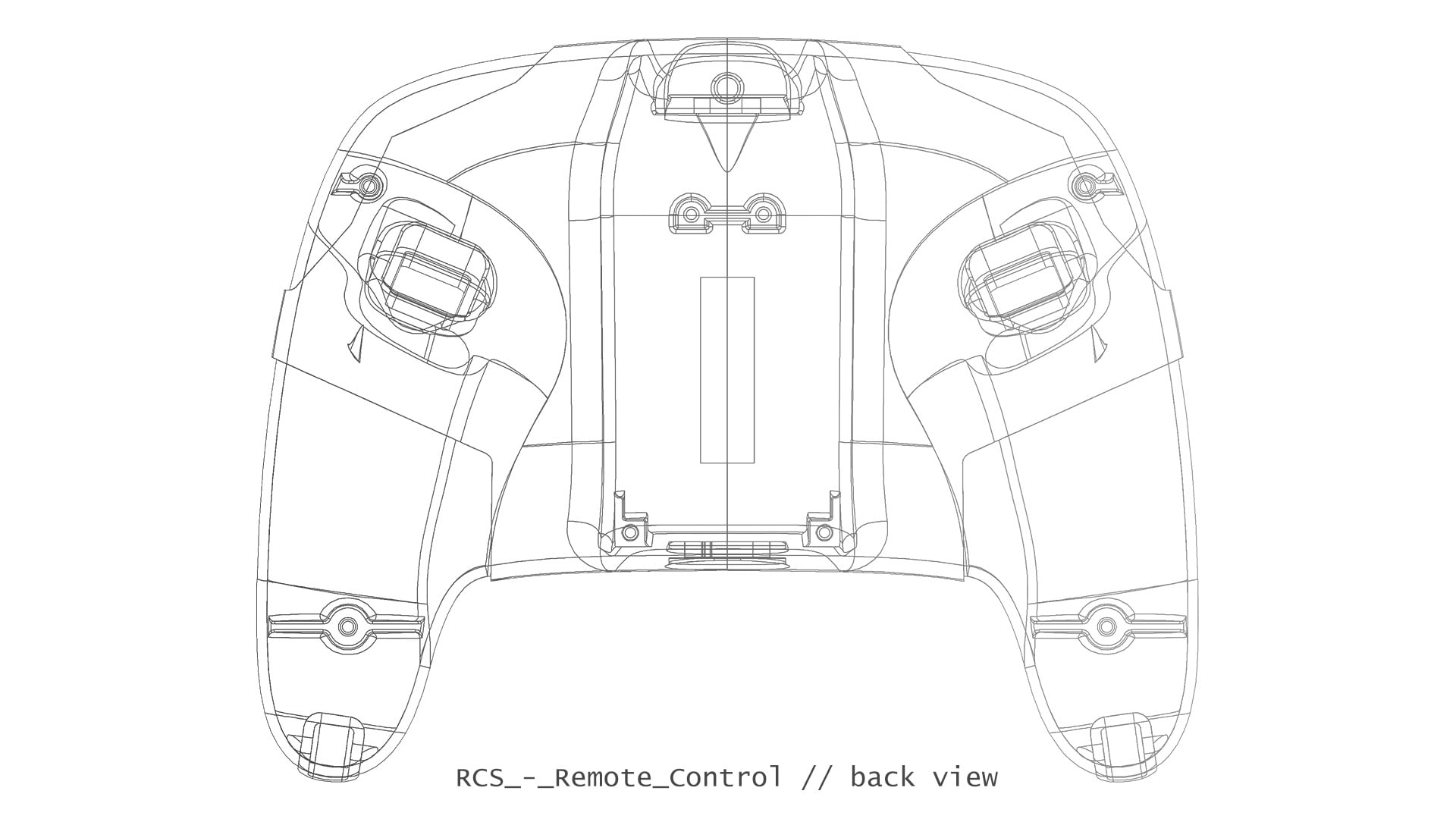
SurfaceID took part in the concept development and mechanical design of the central controller of an entire open integration platform for robotic systems. The device would become the user interface connected to instrumentations, sensor packages, autonomy softwares and the main equipment drive systems.
The remote controller had to be sturdy and airtight so that it could be used even among rain, sand and mud—all while maintaining the optimal ergonomy of a handheld controller.